聯系我們
與泰克代表實時聊天。 工(gōng)作(zuò)時間:上午 9:00 - 下午 5:00(太平洋标準時間)。
緻電(diàn)我們
工(gōng)作(zuò)時間:上午9:00-下午5:00(太平洋标準時間)
下載
下載手冊、産(chǎn)品技(jì )術資料、軟件等:
反饋
三相逆變器電(diàn)機驅動器分(fēn)析
5 系列/5 系列 B/6 系列 B MSO 選配 5-IMDA/6-IMDA 應用(yòng)産(chǎn)品技(jì )術資料

三相電(diàn)力系統的測量和分(fēn)析本質(zhì)上比單相系統更複雜。盡管示波器能(néng)夠以高采樣率捕獲電(diàn)壓和電(diàn)流波形,但需進一步計算才能(néng)從數據中(zhōng)産(chǎn)生關鍵的功率測量值。基于示波器的三相解決方案允許使用(yòng)高達 16 位的 HiRes 采集模式捕獲具(jù)有(yǒu)更高采樣率、更長(cháng)記錄長(cháng)度的三相電(diàn)壓和電(diàn)流波形,并在自動測量的支持下産(chǎn)生關鍵的功率測試結果。基于脈寬調制 (PWM) 的功率轉換器(例如變頻電(diàn)機驅動器)會使測量複雜化,因為(wèi)提取 PWM 信号的精(jīng)确零交叉點非常重要,因此對于電(diàn)機設計師而言,示波器成為(wèi)推薦的用(yòng)于驗證和故障排除的測試工(gōng)具(jù)。旨在用(yòng)于對逆變器、電(diàn)機和驅動器進行自動化功率分(fēn)析的專用(yòng)軟件,極大地簡化了對 PWM 系統的重要三相功率測量,并可(kě)以幫助工(gōng)程師更快地了解他(tā)們的設計。借助泰克逆變器-電(diàn)機驅動器分(fēn)析 (IMDA) 解決方案,設計師能(néng)夠充分(fēn)利用(yòng) 5 系列/5 系列 B/6 系列 B MSO 上的高級用(yòng)戶界面、六個或八個模拟輸入通道和“高分(fēn)辨率”模式(16 位),設計出更出色和更高效的三相電(diàn)機驅動器系統。IMDA 解決方案能(néng)夠針對工(gōng)業電(diàn)機以及交流感應電(diàn)機、永磁同步電(diàn)機 (PMSM) 和無刷直流 (BLDC) 電(diàn)機的驅動器系統提供快速、準确和可(kě)重複的電(diàn)氣測量結果。它可(kě)以配置為(wèi)測量直流到三相交流轉換器,例如電(diàn)動汽車(chē)中(zhōng)使用(yòng)的轉換器。
主要特點和技(jì )術規格
- 準确分(fēn)析用(yòng)于驅動交流感應電(diàn)機、無刷直流 (BLDC) 電(diàn)機和永磁同步 (PMSM) 電(diàn)機的三相 PWM 信号。
- 基于示波器的獨特相量圖指示已配置布線(xiàn)對的 VRMS、IRMS、VMAG、IMAG 和相位關系,一目了然。
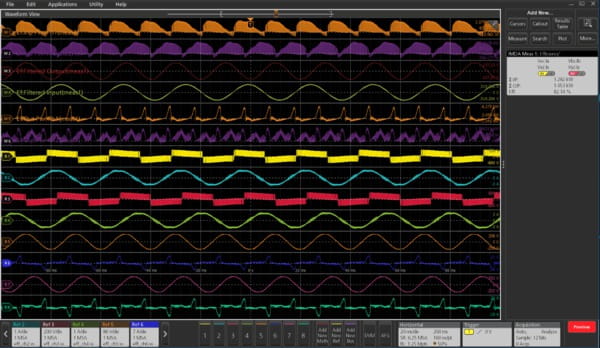
- 通過同時查看時域中(zhōng)的驅動器輸入/輸出電(diàn)壓和電(diàn)流信号及相量圖,來調試電(diàn)機驅動器設計。
- 三相自動設置功能(néng)配置示波器的最佳水平、垂直、觸發和采集參數,以采集三相信号。
- 根據 IEC-61000-3-2、IEEE-519 或自定義限制測量三相諧波。
- 根據選定的接線(xiàn)配置測量系統效率。
- 通過 5 系列/5 系列 B/ 6 系列 B MSO 上直觀的拖放界面,快速添加和配置測量設置。
- 分(fēn)析逆變器和汽車(chē)三相設計中(zhōng)的直流輸入和交流輸出接線(xiàn)配置。
- 在分(fēn)析期間顯示 PWM 過濾的邊沿限定符波形。
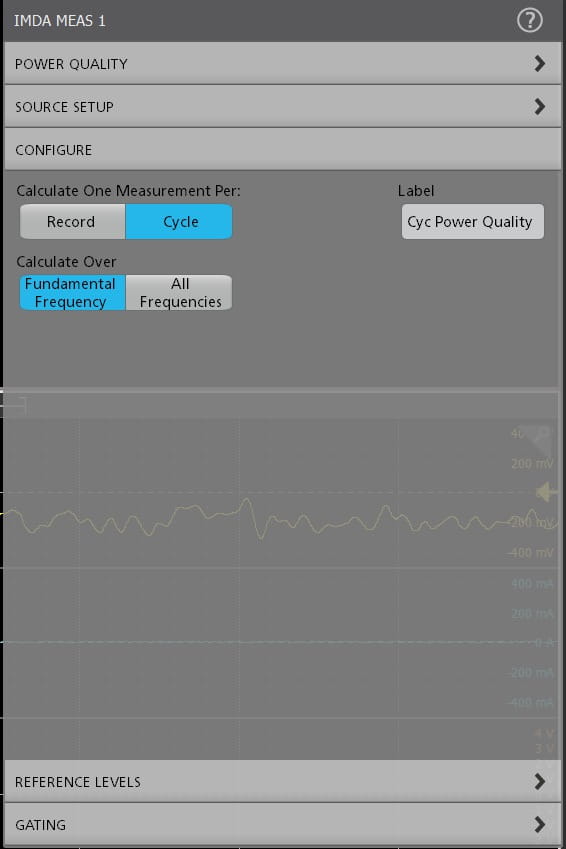
- 在特定測量的分(fēn)析過程中(zhōng),顯示每個記錄或每個周期模式的測試結果。
- 支持特定測量的時間趨勢圖和采集趨勢圖。
- 支持特定接線(xiàn)的線(xiàn)對線(xiàn)到線(xiàn)對中(zhōng)性線(xiàn)的數學(xué)轉換。
- 支持使用(yòng)相量圖和 DQ0 合成向量進行 DQ0 測量。
- 支持使用(yòng)霍爾傳感器和 QEI(正交編碼器接口)信号進行機械測量,無論是否使用(yòng)“索引”脈沖。
- 支持扭矩測量。
- 支持通過基頻和全頻譜對所有(yǒu)測量進行諧波門控。
測量概述
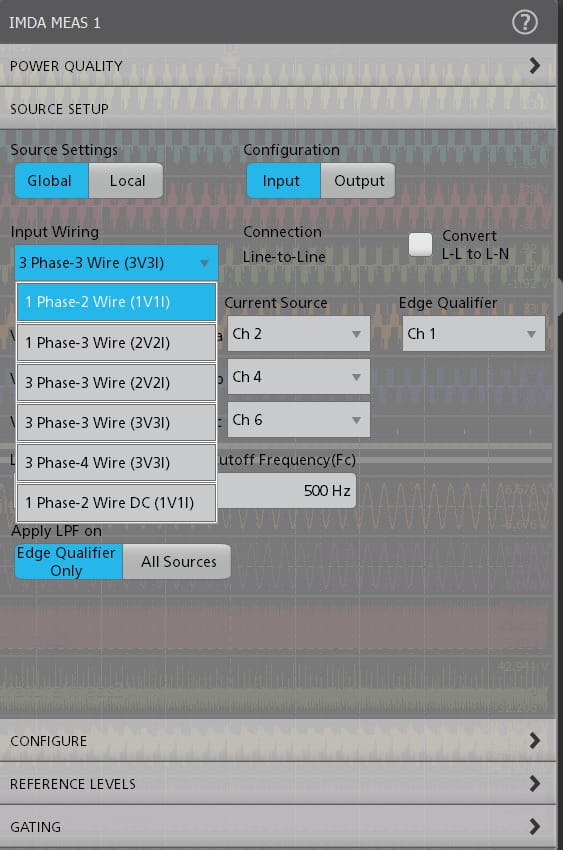
可(kě)變頻驅動器等三相功率轉換器在設計過程中(zhōng)需要進行一系列測量。用(yòng)于 5 系列/5 系列 B/6 系列 B MSO 的“逆變器、電(diàn)機和驅動器分(fēn)析”套件自動執行“電(diàn)氣分(fēn)析”組别中(zhōng)的關鍵電(diàn)氣測量。測量設置可(kě)配置為(wèi)測量輸入或輸出接線(xiàn)配置。

測量可(kě)設置為(wèi)測量 1V1I(1 相 2 線(xiàn))、2V2I(1 相 3 線(xiàn))、2V2I(3 相 3 線(xiàn))、1V1I(1 相 2 線(xiàn)直流)或 3V3I(3 相 3 線(xiàn))和 3P4W(3 相 4 線(xiàn))以支持各種電(diàn)源和電(diàn)機配置。可(kě)進行線(xiàn)對線(xiàn)或線(xiàn)對中(zhōng)性線(xiàn)的測量,以支持 Delta 和 Wye 或 Star 配置。
諧波
功率波形很(hěn)少為(wèi)教科(kē)書式的正弦曲線(xiàn)。諧波測量将非正弦電(diàn)壓或電(diàn)流波形分(fēn)解為(wèi)其正弦分(fēn)量,指示各分(fēn)量的頻率和幅度。
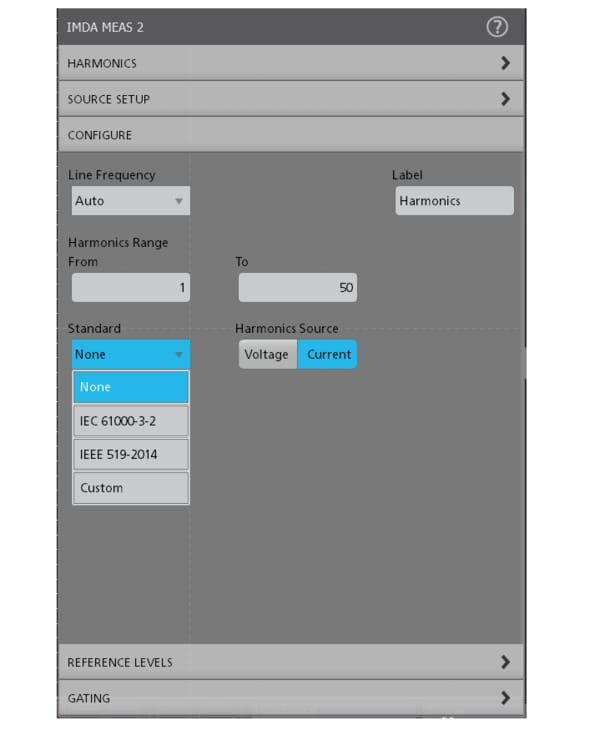
最多(duō)可(kě)對 200 次諧波執行諧波分(fēn)析。可(kě)以根據您的需求,在測量配置中(zhōng)指定測量範圍來設置最大諧波次數。測量各相位的 THD-F、THD-R 和基波值。可(kě)以根據 IEEE-519 或 IEC 61000-3-2 标準或自定義限制對測量進行評估。可(kě)以将測試結果記錄在詳細的報告中(zhōng),并指示狀态(通過/失敗)。

諧波圖顯示的是所有(yǒu)三相的測試彙總結果,因此用(yòng)戶可(kě)以關聯各相之間的測試結果。該圖還直觀地顯示測試結果。在通過條件下,諧波條以綠色突出顯示,并在超過測試限制時以紅色突出顯示。這便于在調試諧波設計時快速了解情況。
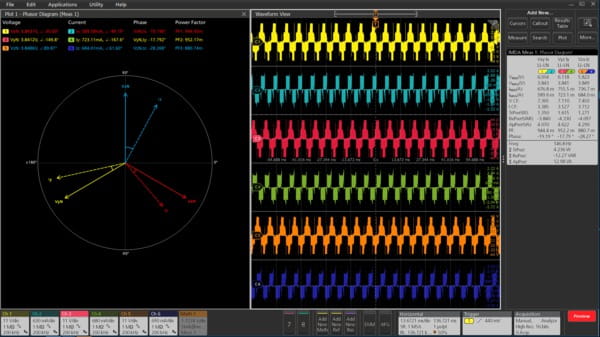
電(diàn)能(néng)質(zhì)量
該項測量提供關鍵的三相電(diàn)力子項測量,包括:電(diàn)壓和電(diàn)流的頻率和 RMS 幅度、電(diàn)壓和電(diàn)流的波峰因數、PWM 頻率以及各相的相角。它還顯示有(yǒu)功功率總和、無功功率總和、視在功率分(fēn)量總和。
此外,在線(xiàn)對中(zhōng)性線(xiàn)配置中(zhōng),此測量顯示所有(yǒu)三相的有(yǒu)功功率、無功功率和視在功率分(fēn)量。
電(diàn)壓和電(diàn)流矢量可(kě)以顯示在相量圖上,因此您可(kě)以快速判斷各相的相移和相間的平衡。每個向量由一個 RMS 值表示,相位通過使用(yòng)離散傅立葉變換 (DFT) 方法計算。
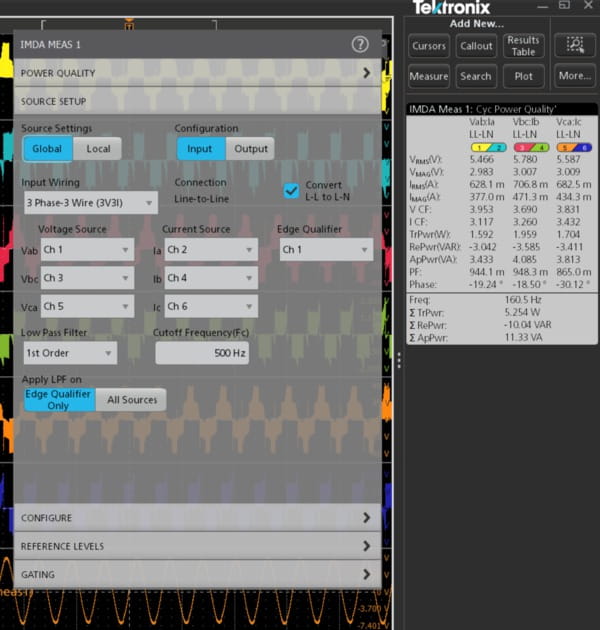
功率質(zhì)量測量可(kě)配置為(wèi)在輸出側提供關鍵三相功率測量,包括:電(diàn)壓和電(diàn)流的頻率和 RMS 幅度、電(diàn)壓和電(diàn)流的波峰因數、PWM 頻率、有(yǒu)功功率、無功功率、視在功率、每相的功率因數和相角。 
效率
效率測量輸出功率與輸入功率的比率。IMDA 解決方案支持三相交流和逆變器配置的效率。通過使用(yòng) 2V2I 方法,可(kě)以使用(yòng) 8 個示波器通道(輸入側有(yǒu) 2 個電(diàn)壓源和 2 個電(diàn)流源,輸出側有(yǒu) 2 個電(diàn)壓源和 2 個電(diàn)流源)測量三相效率。該解決方案根據不同的輸入和輸出接線(xiàn)組合計算各相位的效率(對于 3V3I 配置)和系統的總(平均)效率。 

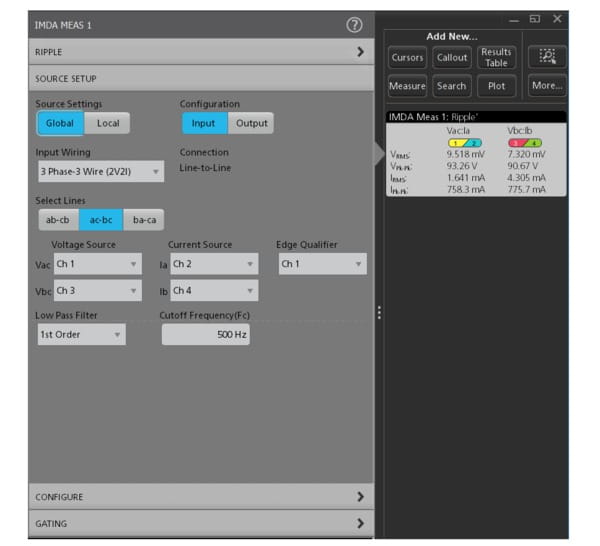
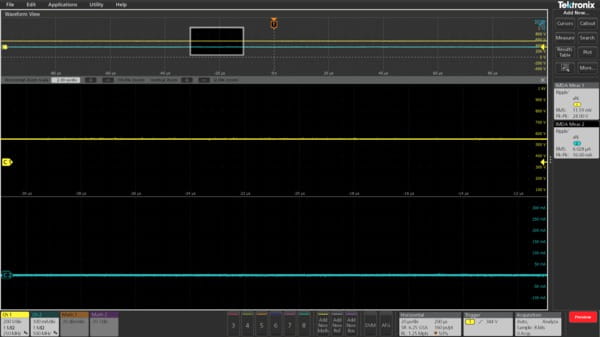
紋波分(fēn)析
紋波被定義為(wèi)恒定直流分(fēn)量上的殘餘或多(duō)餘交流電(diàn)壓。通常在直流總線(xiàn)上測量紋波。此測量有(yǒu)助于了解信号在輸入端從 AC 轉換為(wèi) DC 的效率,以及多(duō)餘分(fēn)量對輸出端的 PWM 信号的影響。
直接正交零點 (DQ0) 分(fēn)析
三相交流電(diàn)機的行為(wèi)可(kě)通過如下旋轉電(diàn)壓和電(diàn)流方程進行描述。
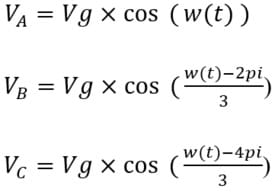
其中(zhōng):
A、B、C 是三相交流信号。
“Vg”是相應的增益。
“w(t)”是 2pi×f×t。
AC 接口處的電(diàn)壓 (V) 和電(diàn)流 (I) 通常分(fēn)開,一般相差 120 度。這些 V 和 I 分(fēn)量是時變的,這意味着沒有(yǒu)穩态工(gōng)作(zuò)點的表示。
通常,交流信号是真實世界的信号,但将它們轉換為(wèi)直流信号有(yǒu)助于獲得直接正交變換的抽象表示。DQ0 有(yǒu)助于模拟控制器。這些信息有(yǒu)助于更多(duō)地了解控制器正在做什麽,并允許調整控制器設計。
DQ0 變換通常會旋轉 AC 波形的參考系,以将其轉換為(wèi) DC 信号。這樣便可(kě)在執行逆變換以恢複實際三相交流結果之前對直流信号進行簡化計算。
為(wèi)測量和監控控制系統的輸出,設計人員依靠 FPGA 和基于 ASIC 的硬件處理(lǐ)傳感器數據以獲取 DQ0 信息,然後通過多(duō)次叠代檢查控制信息。該解決方案涉及複雜且耗時的過程。
測量或探測 D-Q-0 信号實際上具(jù)有(yǒu)挑戰性。典型的解決方案為(wèi)控制器提供外部激勵,以将控制器輸入信号和模數控制器 (ADC) 輸出複制為(wèi) DQ0 信号。
為(wèi)應對這一挑戰,用(yòng)戶依靠軟件應用(yòng)程序 DQ0 解決方案了解電(diàn)源控制系統中(zhōng)的複雜動态現象。
IMDA 解決方案采用(yòng) DQ0 變換,旋轉三相波形的參考系,使其成為(wèi)直流信号。這些直流量的計算可(kě)以簡化,然後将其逆變,得到實際的三相交流結果。基本控制方案如下圖所示。
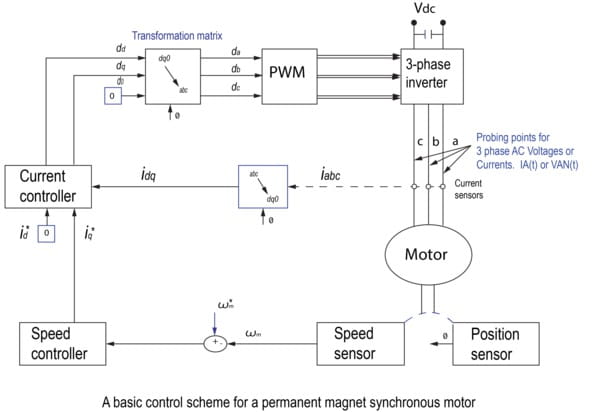
泰克在電(diàn)氣分(fēn)析測量類别下提供一種名(míng)為(wèi) DQ0 的示波器測量,作(zuò)為(wèi)使用(yòng) Clarke 和 Park 變換矩陣的附加選項。在 5 系列、5 系列 B 和 6 系列 B MSO 上,DQ0 功能(néng)作(zuò)為(wèi)選件 5-IMDA-DQ0/6-IMDA-DQ0 提供。
DQ0 方法将角度 (θ) 計算為(wèi) 2*pi*f*t,并根據我們預期的時變信号所在位置來外推參考系。DQ0 幀(相量圖)以正确的速度和頻率旋轉,不一定與轉子同相,這有(yǒu)助于理(lǐ)解電(diàn)機的瞬時狀态。
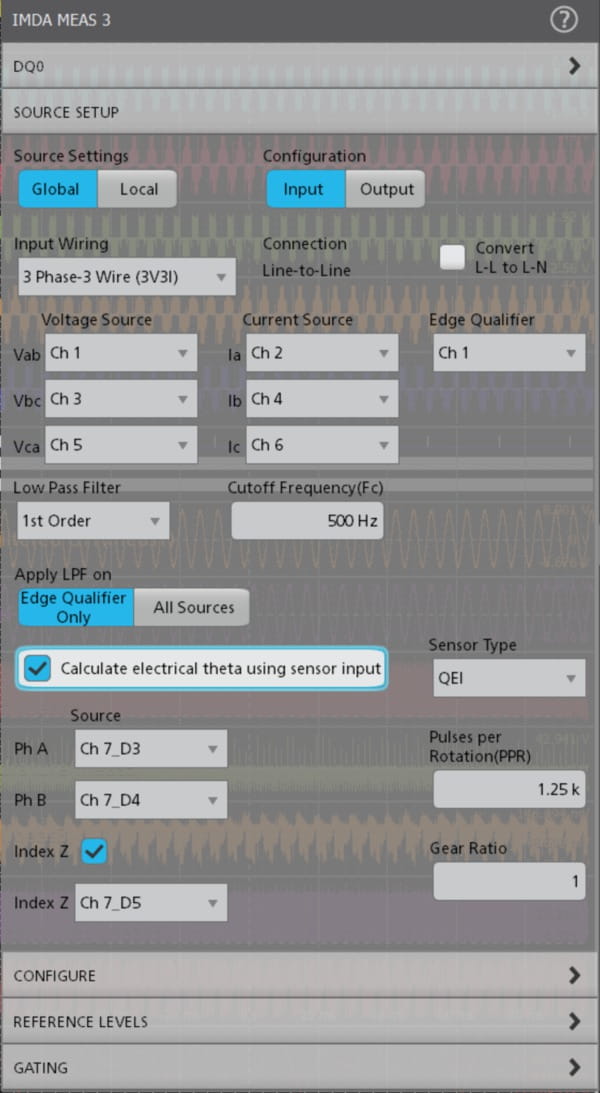
3V3I 配置支持此測量,将來自電(diàn)機的三相電(diàn)壓或電(diàn)流信号作(zuò)為(wèi)輸入,并将其轉換為(wèi) D-Q-0 系數,作(zuò)為(wèi)電(diàn)機設計人員調整其 PWM 控制器電(diàn)路設計的強大調試工(gōng)具(jù)。
該測量通過轉換三相驅動器輸出電(diàn)壓或電(diàn)流波形計算實時 DQ0 轉換。變換矩陣将時變交流信号轉換為(wèi)非時變直流分(fēn)量。這有(yǒu)助于重現控制系統對瞬時電(diàn)機扭矩和速度的理(lǐ)解。通過使用(yòng) DQ0 變換,電(diàn)機設計人員能(néng)夠将三相電(diàn)源部分(fēn)的性能(néng)與控制系統的硬件算法和設計相關聯。重疊的 DQ0 和三相 ABC 矢量作(zuò)為(wèi)一項很(hěn)好的調試特征,設計人員可(kě)以在同一繪圖上同時觀察兩個向量軸。
此測量具(jù)有(yǒu)不同的輸出,例如具(jù)有(yǒu) D 和 Q 幅度的标量值、具(jù)有(yǒu)統計數據的 RMS 值、導出的數學(xué)波形和相量圖。數學(xué)波形提供直流變換後的波形。這在單個視圖中(zhōng)提供控制系統輸出的不同視圖。
通過觀察 DQ0 結果,可(kě)以得出一些重要的推論,如表示 RMS 紋波、峰峰值和高次諧波的變化。這些參數與理(lǐ)解控制系統中(zhōng)算法的操作(zuò)直接相關。若無這些信息,則難以理(lǐ)解電(diàn)機控制系統的性能(néng)。
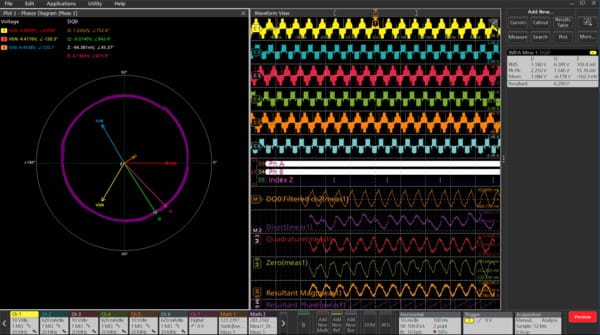
增強的 DQ0 算法通過 D 和 Q 分(fēn)量計算合成向量,并将合成向量顯示為(wèi)重疊的電(diàn)機旋轉,并與瞬時電(diàn)機角度 (theta) 合并。

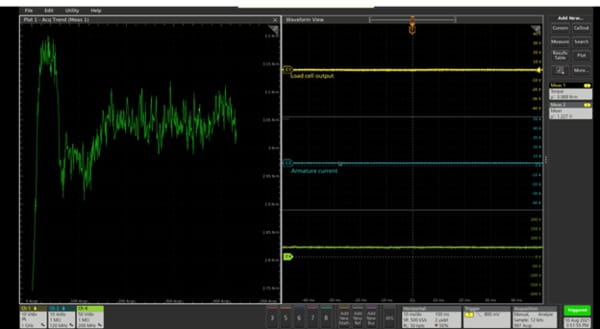
使用(yòng)趨勢分(fēn)析進行動态測量
電(diàn)機驅動器分(fēn)析的一項常見要求是,能(néng)夠在更長(cháng)的測試時間、記錄和大量采集中(zhōng)查看電(diàn)機響應,以監控不同負載條件下的 DUT 行為(wèi)。這種動态測量有(yǒu)助于了解最佳設計和電(diàn)壓、電(diàn)流、功率、頻率等不同參數間的相互依賴性及其基于負載條件的變化。您可(kě)以手動縮放并獲取感興趣的特定區(qū)域,以查看波形特定區(qū)域的測試結果。
IMDA 解決方案提供兩種獨特的電(diàn)能(néng)質(zhì)量測量趨勢圖,以支持此類要求:
- 時間趨勢圖
- 采集趨勢圖
每幅繪圖均有(yǒu)其優點,可(kě)用(yòng)于繪制電(diàn)能(néng)質(zhì)量測量下支持的子測量。時間趨勢圖顯示的是各周期或采集波形(記錄)的測量值,而采集趨勢圖顯示的是每次采集中(zhōng)各記錄的測量值平均值。可(kě)在測試配置期間設置采集計數。這使您能(néng)夠捕獲長(cháng)數據記錄以執行深入的記錄分(fēn)析并了解運動響應的動态行為(wèi)。繪圖可(kě)另存為(wèi) CSV 文(wén)件以進行後處理(lǐ)。



機械分(fēn)析
IMDA 機械分(fēn)析組别(選件 IMDA-MECH)支持使用(yòng)霍爾傳感器和 QEI 輸出信号來計算速度、加速度和方向信息。除了這些測量外,QEI 方法還支持角度測量并以度或弧度顯示。加速度結果在報告中(zhōng)作(zuò)為(wèi)速度測量的一部分(fēn)。測量需要極對數和相應的齒輪比測量關鍵的電(diàn)機參數。方向測量需要在操作(zuò)前配置一系列霍爾傳感器上升邊沿,并在操作(zuò)期間對其進行驗證。對于 QEI 方法,測量需要用(yòng)到 QEI 輸出信息 - 相位 A、相位 B、可(kě)選 Z 索引脈沖和每轉脈沖數 (PPR)。
TPP1000 無源探頭或高壓差分(fēn) THDP0200/100 探頭可(kě)根據電(diàn)機輸出功率和噪聲水平捕獲傳感器輸出。建議使用(yòng)帶有(yǒu) TLP 邏輯探頭的數字通道代替模拟通道,因為(wèi)噪聲較小(xiǎo),有(yǒu)助于為(wèi)其他(tā)測試操作(zuò)保留模拟通道,并使用(yòng)單個靈活通道進行測量。
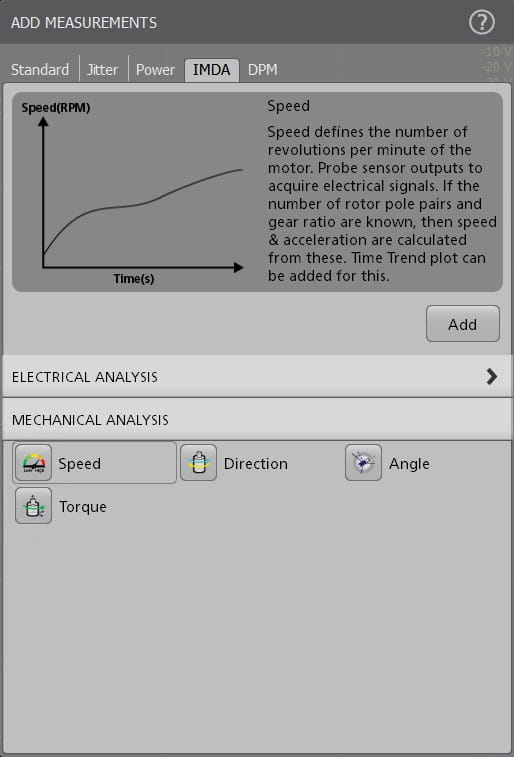
速度測量
霍爾傳感器信号轉換如下圖所示。
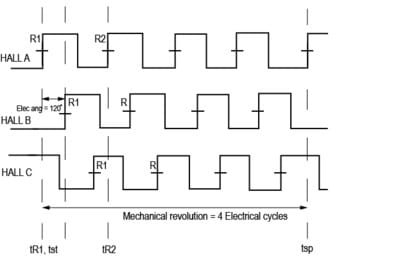
速度由以下等式定義,

其中(zhōng):
TSP 和 TST 之間的差異由極對數量定義。
TST 是電(diàn)脈沖的開始
TSP 是電(diàn)脈沖的結束
60 是 RPM(每分(fēn)鍾轉數)
G 是齒輪比。
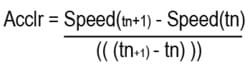
加速度
加速度是單位時間内速度的變化率。定義為(wèi)
速度和方向支持以下各圖:
- 直方圖
- 時間趨勢圖
- 采集趨勢圖

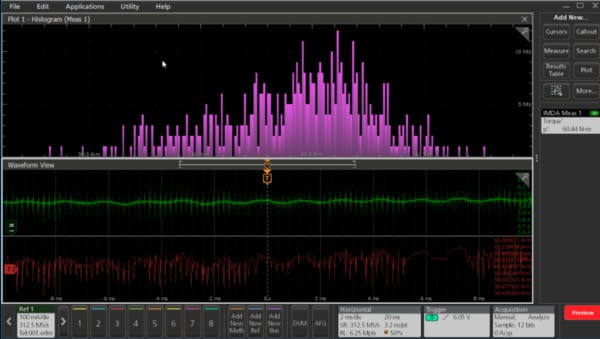
速度采集趨勢圖的重要性
采集趨勢圖和直方圖顯示電(diàn)機速度的抖動,否則需要使用(yòng)顫振儀等專用(yòng)儀器進行測量。該抖動信息(邊緣時序的變化)測量電(diàn)機速度的一緻性。

電(diàn)機啓動配置文(wén)件
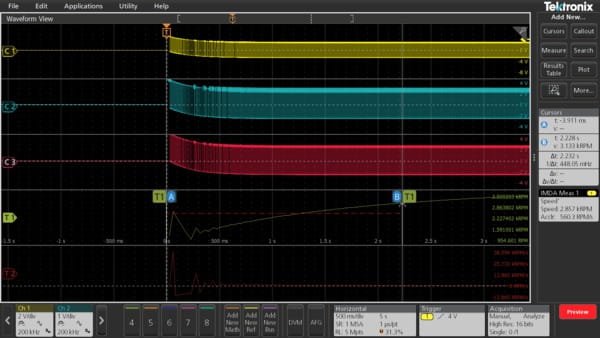
電(diàn)機設計人員有(yǒu)興趣在設計階段研究電(diàn)機啓動配置文(wén)件。時間趨勢給出電(diàn)機的瞬時速度信息,否則很(hěn)難測量。
下面是顯示電(diàn)機啓動順序的時間趨勢圖,其中(zhōng)電(diàn)機從 OFF(關閉)狀态切換到 ON(開啓)狀态所需的啓動時間為(wèi) 2.3s。同樣,可(kě)以執行 ON(開啓)切換到 OFF(關閉)狀态并深入了解減速過程,如顯示電(diàn)機減速進入停止狀态的時間趨勢圖所示。

方向
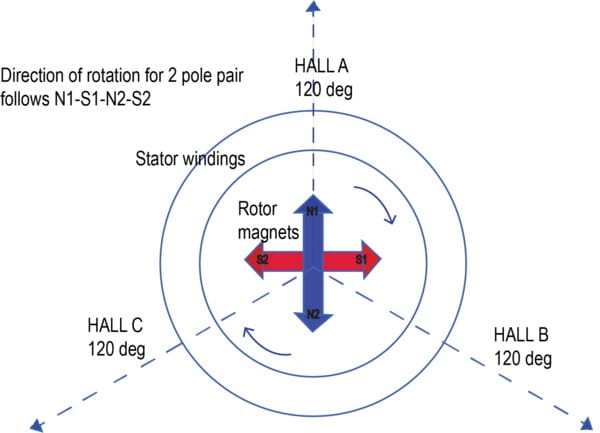
鑽機、洗衣機和電(diàn)動泵等一些應用(yòng)需要電(diàn)機快速運行和變向。方向測量有(yǒu)助于此分(fēn)析。霍爾傳感器輸出的上升邊沿或下降邊沿的順序決定旋轉方向。方向測量需要所有(yǒu)三個霍爾信号。它們可(kě)用(yòng)作(zuò)方向測量的可(kě)配置參數,并在電(diàn)機運行期間進行驗證。通常,A-B-C 序列被解釋為(wèi)順時針 (CW),而 A-C-B 序列被解釋為(wèi)逆時針 (CCW)。
例如,如果第一個上升沿來自霍爾傳感器 A,而霍爾傳感器 B 的上升沿存在于 120 度處,則轉子旋轉順序為(wèi) A-B-C。否則,如果霍爾傳感器 C 的第二個上升沿出現在 120 度處,則順序為(wèi) A-C-B。

以下是計算方向信息的公(gōng)式。
順序(順時針) = (A-B-C)
順序(逆時針) = (A-B-C)
其中(zhōng),順序功能(néng)檢查所有(yǒu)三個霍爾傳感器信号的上升邊沿順序。
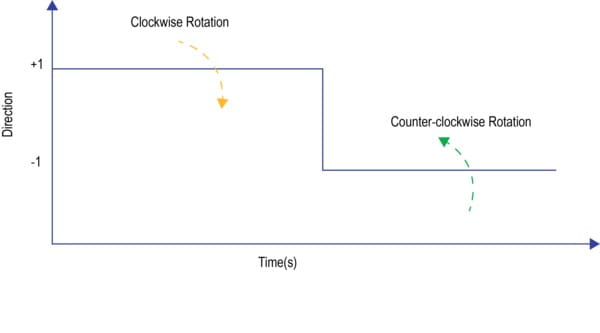
方向可(kě)以顯示為(wèi) ACQ 趨勢圖,以便在調試期間使電(diàn)機反轉方向時給出準确的可(kě)視化時戳指示。這在下圖中(zhōng)顯示為(wèi)示例圖。
扭矩測量
電(diàn)機的扭矩是其輸出軸上産(chǎn)生的旋轉力,它是一種以牛頓米 (Nm) 為(wèi)單位的扭轉力。
IMDA 支持兩種扭矩測量方法:
- 傳感器法:
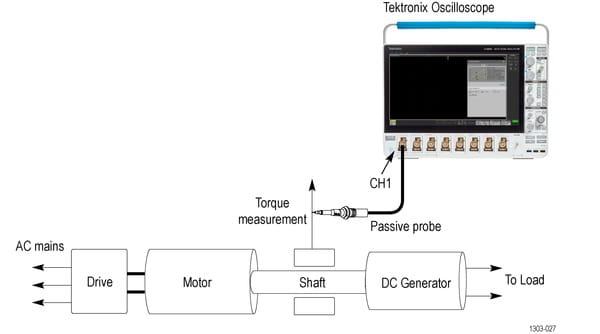
這是最常見的扭矩測量方法,它使用(yòng)扭矩傳感器或測力傳感器輸出。通過将旋轉扭矩傳感器與電(diàn)機軸連接在一起,可(kě)以測量電(diàn)機産(chǎn)生的扭矩。用(yòng)戶可(kě)以使用(yòng)無源電(diàn)壓探頭捕獲扭矩波形。電(diàn)壓波形與扭矩測量值成正比。
用(yòng)戶必須配置扭矩傳感器的高值、低值以及相應輸出電(diàn)壓的高值、低值。該測量方法将采集到的電(diàn)壓波形重新(xīn)計算為(wèi)扭矩值。
測力傳感器提供作(zuò)用(yòng)力。扭矩值以力和臂長(cháng)(距離)的乘積計算得出。

- 電(diàn)流法:
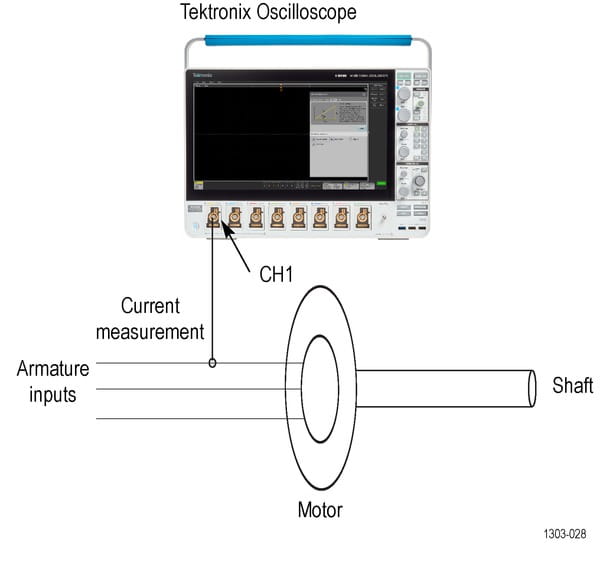
許多(duō)電(diàn)機都有(yǒu)數據規格,可(kě)以根據這些規格,通過使用(yòng)扭矩常數,按照與施加的 RMS 電(diàn)流所成的比例推斷出扭矩。這是扭矩的估計值。
通常,任何直流電(diàn)機中(zhōng)産(chǎn)生的扭矩都與扭矩常數和電(diàn)樞電(diàn)流的乘積成正比。在串聯電(diàn)機中(zhōng),磁場電(diàn)流與電(diàn)樞電(diàn)流成正比。
據估計,轉子産(chǎn)生的扭矩與電(diàn)樞電(diàn)流成正比。用(yòng)戶必須配置電(diàn)機的扭矩常數。
扭矩 = 扭矩常數 x Irms

扭矩測量支持以下圖解:
- 直方圖
- 時間趨勢圖
- 采集趨勢圖
以下扭矩單位需要配置:
- 牛頓米 (N·m)
- 英尺磅 (ft·lb)
- 英寸盎司 (in·oz)
- 英寸磅 (in·lb)。
報告生成
IMDA 軟件簡化了設計和開發過程的數據收集、歸檔和文(wén)檔編制。它支持生成 MHT 或 PDF 格式的報告,并帶有(yǒu)通過/失敗結果,以便于分(fēn)析。 
技(jì )術規格
- 接線(xiàn)配置
- 1V1I(1 相 2 線(xiàn)),2V2I(1 相 3 線(xiàn)),2V2I(3 相 3 線(xiàn)),2V2I(直流輸入交流輸出),3V3I(直流輸入交流輸出)或 3V3I(3 相 3 線(xiàn))和 3P4W(3 相 4 線(xiàn))
- L-L(線(xiàn)對線(xiàn))轉換為(wèi) L-N(線(xiàn)對中(zhōng)性線(xiàn))
- 适用(yòng)于 3 相 3 線(xiàn) (3V3I)1
- 電(diàn)氣分(fēn)析
- 電(diàn)能(néng)質(zhì)量,諧波2、紋波、DQ03、效率4
- 支持的傳感器
- 霍爾傳感器和 QEI(正交編碼器接口)
- 機械分(fēn)析
- 速度、加速度、角度(QEI 法)、方向和扭矩
- 諧波門控
- 基頻和全頻譜
- 三相自動設置
- 适用(yòng)于所有(yǒu)測量
- 繪圖
- 時間趨勢圖、ACQ 趨勢圖、相量圖、諧波條形圖 5、DQ0 圖和直方圖(速度分(fēn)布)
- 報告
- MHT 和 PDF 格式,數據導出到 CSV 格式
- 消磁/時延校正(靜态)
- 自動檢測探頭,自動調零。用(yòng)戶可(kě)以對電(diàn)壓和電(diàn)流探頭進行相位校正,從每個通道的菜單中(zhōng)對電(diàn)流探頭進行消磁
- 源信号支持
- 實時模拟信号,基準波形,數學(xué)波形
訂貨信息
型号
| 産(chǎn)品 | 選件6 | 支持的儀器 | 可(kě)用(yòng)帶寬 |
|---|---|---|---|
| 新(xīn)儀器訂購(gòu)選項 | 5-IMDA | 5 系列/5 系列 B MSO(MSO56、MSO58、MSO56B、MSO58B) |
|
| 産(chǎn)品升級選項 | SUP5-IMDA | ||
| 浮動許可(kě)證 | SUP5-IMDA-FL | ||
| 新(xīn)儀器訂購(gòu)選項 | 5-IMDA-DQ0 | ||
| 産(chǎn)品升級選項 | SUP5-IMDA-DQ0 | ||
| 浮動許可(kě)證 | SUP5-IMDA-DQ0-FL | ||
| 新(xīn)儀器訂購(gòu)選項 | 5-IMDA-MECH | ||
| 産(chǎn)品升級選項 | SUP5-IMDA-MECH | ||
| 浮動許可(kě)證 | SUP5-IMDA-MECH-FL | ||
| 新(xīn)儀器訂購(gòu)選項 | 6-IMDA | 6 系列 B MSO(MSO66B,MSO68B) |
|
| 産(chǎn)品升級選項 | SUP6B-IMDA | ||
| 浮動許可(kě)證 | SUP6B-IMDA-FL | ||
| 新(xīn)儀器訂購(gòu)選項 | 6-IMDA-DQ0 | ||
| 産(chǎn)品升級選項 | SUP6B-IMDA-DQ0 | ||
| 浮動許可(kě)證 | SUP6B-IMDA-DQ0-FL | ||
| 新(xīn)儀器訂購(gòu)選項 | 6-IMDA-MECH | ||
| 産(chǎn)品升級選項 | SUP6B-IMDA-MECH | ||
| 浮動許可(kě)證 | SUP6B-IMDA-MECH-FL |
軟件套件
| 支持的儀器 | 套件選項 | 說明 |
|---|---|---|
5 系列/5 系列 B MSO | 5-PRO-POWER-1Y | 專業版電(diàn)能(néng)套件 1 年期許可(kě)證 |
| 5-PRO-POWER-PER | 專業版電(diàn)能(néng)套件永久許可(kě)證 | |
| 5-ULTIMATE-1Y | 旗艦版套件 1 年期許可(kě)證 | |
| 5-ULTIMATE-PER | 旗艦版套件永久許可(kě)證 | |
| 5-PRO-AUTO-1Y | 專業版汽車(chē)套件 1 年期許可(kě)證 | |
| 5-PRO-AUTO-PER | 專業版汽車(chē)套件永久許可(kě)證 | |
| 6 系列 B MSO | 6-PRO-POWER-1Y | 專業版電(diàn)能(néng)套件 1 年期許可(kě)證 |
| 6-PRO-POWER-PER | 專業版電(diàn)能(néng)套件永久許可(kě)證 | |
| 6-ULTIMATE-1Y | 旗艦版套件 1 年期許可(kě)證 | |
| 6-ULTIMATE-PER | 旗艦版套件永久許可(kě)證 | |
| 6-PRO-AUTO-1Y | 專業版汽車(chē)套件 1 年期許可(kě)證 | |
| 6-PRO-AUTO-PER | 專業版汽車(chē)套件永久許可(kě)證 |
推薦探頭
| 探頭型号 | 說明 | 數量 |
|---|---|---|
| TCP0030A 或 TCP0150 | 電(diàn)流探頭 | 3 用(yòng)于 3V3I 接線(xiàn)7 |
| THDP0200 或 TMDP0200 | 高壓差分(fēn)探頭 | 3 用(yòng)于 3V3I 接線(xiàn) 7 |
1 對于 3 相 4 線(xiàn) (3V3I),連接方式始終為(wèi)線(xiàn)對中(zhōng)性線(xiàn),而對于 3 相 3 線(xiàn) (2V2I),則為(wèi)線(xiàn)對線(xiàn)。
2 支持自定義限制。
3 僅适用(yòng)于 3V3I 布線(xiàn)。
4 僅适用(yòng)于 2V2I 布線(xiàn)。
5 範圍濾波器屬于測量配置的一部分(fēn)。
6 作(zuò)為(wèi)前提條件,選件 IMDA-DQ0 和 IMDA-MECH 需要用(yòng)到選件 IMDA
7 為(wèi)執行效率測量,需要用(yòng)到四個量。
當社はSRI Quality System Registrar によりISO 9001 およびISO 14001 に登録されています。 製品は、IEEE 規格488.1-1987、RS-232-C および當社標準コード&フォーマットに適合しています。 評価対象の製品領域:電子テストおよび測定器の計畫、設計/開発および製造。 48C-61649-4


